André Guignard - La souris, l’interface homme-machine par excellence!
23.09.2023
Présenté par André Guignard lors de la Nuit de Musées 2023.
Retranscription de la présentation par Anne-Sylvie Weinmann, avocate et data scientist.
Un musée, des museaux: la souris, reine de la Nuit des Musées 2023
Un musée, des museaux. Voici le thème l’édition 2023 de la Nuit des Musées de Lausanne et de Pully. Taillé sur mesure pour le Musée Bolo! Logiquement, la souris y était à l’honneur. Et pour nous en parler, qui mieux qu’André Guignard? Ce virtuose de la micromécanique nous a fait l’immense plaisir de partager avec nous quelques pages, qu’il a contribué à écrire, des débuts de l’histoire de ce périphérique désormais omniprésent.
Pour nous préparer à plonger dans cette aventure extraordinaire, Cédric Gaudin président de l’association Les Amis du Musée Bolo et de la fondation Mémoires Informatiques le présente brièvement: “Initialement formé comme horloger, André Guignard a par la suite évolué vers une carrière d’ingénieur électricien. Sa trajectoire l’a amené à travailler dès 1976 à l’EPFL, au sein du Laboratoire des Calculatrices Digitales (LCD), renommé Laboratoire de Micro-Informatique (LAMI) en 1980, et dirigé par le professeur Jean-Daniel Nicoud, père des micro-ordinateurs Smaky (1974). André Guignard y a joué un rôle déterminant, puisque c’est lui qui est à l’origine de la célèbre souris Dépraz, la fameuse souris arrondie.”
Montage vidéo et captation | © Jean-Marc Koller
Un moment d’histoire vivante de l’informatique avec André Guignard
1976 – 2023: un abîme technologique
Le silence se fait dans la salle, nous remontons le temps avec André Guignard, destination une époque où il n’y avait pas (encore!) de souris comme interface humain-machine.

“Ce dont je vais vous parler date de plus de quarante ans. C’est une vieille histoire, et il y a prescription depuis longtemps! Ceci pour vous dire que les nombreuses imprécisions, erreurs ou omissions que vous pourriez relever, ne m’étonneraient en aucune façon. Si l’un ou l’autre d’entre vous trouve une correction à apporter à mon discours, qu’il n’hésite pas à m’interrompre. Car chacun sait que la mémoire humaine, à l’inverse de celle des ordinateurs, a une fâcheuse tendance à oublier les faits qui dérangent, voire de combler de manière plus ou moins consciente, les trous dans le tissu de ses souvenirs.”
Ce retour dans le passé nous fait traverser un abîme technologique! Pour nous permettre d’en saisir la profondeur, André Guignard l’illustre concrètement en comparant des composants électroniques et ordinateurs de ses débuts à l’EPFL avec quelques appareils incontournables de notre quotidien de ce premier quart du 21e siècle.
Comparaison N°1. “A propos de mémoire, je me souviens qu’en 1976, lorsque j’ai rejoint l’équipe du professeur Nicoud, nous manipulions une mémoire statique avec grand respect, car elle coûtait plus de 200 francs. Il faut dire qu’elle avait une capacité de 2048 bits! Soit 256 bytes ou octets (256 x 8), si l’on veut parler en français. Mon téléphone portable, comme le vôtre je suppose, est capable d’enregistrer 128 Gigaoctets. Soit 500 millions de fois plus que la mémoire représentée sur cette photo. Ceci, juste pour situer l’abîme technologique qui sépare les années 70 de nos jours.”
Comparaison N°2. André Guignard nous montre son téléphone portable, semblable à celui que nous emportons partout. “Ce téléphone portable, vous le savez tous, est en fait un ordinateur environ mille fois plus puissant que le Cray 1, que vous avez pu admirer à l’entrée de ce musée, tant du point de vue puissance de calcul que de ses possibilités graphiques, sans parler bien sûr de la capacité mémoire. Quant aux possibilités de communication, cette machine-là, le Cray, peut être considérée comme datant de l’âge de la pierre.”
Comparaison N°3. “Le LCD possédait un ordinateur appelé Eclipse, dont la mémoire était constituée par un disque dur d’environ un demi-mètre cube (100kg), dont le démarrage du moteur triphasé avait nécessité la pose d’une ligne électrique spéciale, pour éviter de faire lâcher tous les disjoncteurs du labo. Ah oui, il avait une capacité de 60 Mégabytes”. André Guignard montre un disque dur externe, à peine plus grand qu’un téléphone portable, et explique que “ce disque qui coûte 63 francs peut stocker 1 Téraoctet, soit 1012 octets, soit 160 mille fois plus que le gros disque de l’Eclipse de l’époque. Il fallait démarrer l’Eclipse par une série de mots de 16 bits, sauf erreur, introduits au moyen d’interrupteurs. Il possédait un écran alphanumérique à plasma, suprême luxe pour l’époque. Un clavier et un télétype complétaient l’équipement. Mais pas de souris!”

Généalogie
La souris, une histoire de conviction, de créativité et d’ingéniosité, d’audace et de vision aussi, écrite à plusieurs mains.
 Les trois mousquetaires de la souris: René Sommer (à gauche), André Guignard, Jean-Daniel Nicoud, article paru dans le quotidien 24 Heures le 13 octobre 2009 | © Musée Bolo" data-uniqueid="13604-542568" data-guid="https://www.museebolo.ch/wp-content/uploads/2023/10/Musee_Bolo_24_Heures_Les_3_mousquetaires.webp" data-path="2023/10/Musee_Bolo_24_Heures_Les_3_mousquetaires.webp" data-width="1000" data-height="750" data-singlew="8" data-singleh="" data-crop="" data-fixed="" />
Les trois mousquetaires de la souris: René Sommer (à gauche), André Guignard, Jean-Daniel Nicoud, article paru dans le quotidien 24 Heures le 13 octobre 2009 | © Musée Bolo" data-uniqueid="13604-542568" data-guid="https://www.museebolo.ch/wp-content/uploads/2023/10/Musee_Bolo_24_Heures_Les_3_mousquetaires.webp" data-path="2023/10/Musee_Bolo_24_Heures_Les_3_mousquetaires.webp" data-width="1000" data-height="750" data-singlew="8" data-singleh="" data-crop="" data-fixed="" />Les trois mousquetaires de la souris: René Sommer (à gauche), André Guignard, Jean-Daniel Nicoud, article paru dans le quotidien 24 Heures le 13 octobre 2009 | © Musée Bolo
“Il me parait nécessaire, avant toute chose, de faire un petit historique. Le titre de cet article du quotidien 24 Heures laisse entendre que le trio que vous avez sous les yeux serait les inventeurs de la souris. C’est très inexact, évidemment! De gauche à droite vous pouvez voir: René Sommer, qui fait l’objet de cet article, moi-même, et le professeur Nicoud. Si j’ai effectivement travaillé sur la réalisation d’un ou plusieurs modèles de souris, pour la partie mécanique, c’est René Sommer qui est l’auteur de l’électronique interne de la souris et de son interface avec l’ordinateur, ceci sous la direction du professeur Nicoud. C’est sans doute grâce à son enthousiasme sans faille et sa détermination, que toute cette aventure a eu lieu. Sans le professeur Nicoud, pas de souris suisse! Par la suite, René Sommer a travaillé pour la maison Logitech où il a largement contribué au développement et à la diffusion des souris. Mais une seule personne mérite le titre d’inventeur de la souris, et c’est bien sûr: Douglas Engelbart! Inventeur de la souris, mais pas seulement, et de loin. J’y reviendrai en fin d’exposé.”
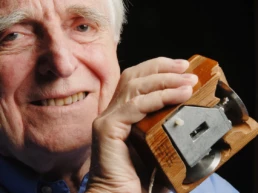 Douglas Engelbart (1925-2013)et sa première souris (1964) | © Holmgren" data-uniqueid="13609-192142" data-guid="https://www.museebolo.ch/wp-content/uploads/2023/10/Doug_Engelbart_503-pose-with-original-mouse-credit_holmgren.webp" data-path="2023/10/Doug_Engelbart_503-pose-with-original-mouse-credit_holmgren.webp" data-width="1266" data-height="839" data-singlew="4" data-singleh="3" data-crop="1" data-fixed="" />
Douglas Engelbart (1925-2013)et sa première souris (1964) | © Holmgren" data-uniqueid="13609-192142" data-guid="https://www.museebolo.ch/wp-content/uploads/2023/10/Doug_Engelbart_503-pose-with-original-mouse-credit_holmgren.webp" data-path="2023/10/Doug_Engelbart_503-pose-with-original-mouse-credit_holmgren.webp" data-width="1266" data-height="839" data-singlew="4" data-singleh="3" data-crop="1" data-fixed="" /> Mother of all Demos (1968). La photo représente une des cinq répliques qu’il existe de la première souris de Douglas Engelbart exposée par le Musée Bolo lors d’événements spéciaux | © Musée Bolo " data-uniqueid="13680-203860" data-guid="https://www.museebolo.ch/wp-content/uploads/2023/10/Musee_Bolo_replique_Douglas_Engelbart.webp" data-path="2023/10/Musee_Bolo_replique_Douglas_Engelbart.webp" data-width="1400" data-height="465" data-singlew="8" data-singleh="" data-crop="" data-fixed="" />
Mother of all Demos (1968). La photo représente une des cinq répliques qu’il existe de la première souris de Douglas Engelbart exposée par le Musée Bolo lors d’événements spéciaux | © Musée Bolo " data-uniqueid="13680-203860" data-guid="https://www.museebolo.ch/wp-content/uploads/2023/10/Musee_Bolo_replique_Douglas_Engelbart.webp" data-path="2023/10/Musee_Bolo_replique_Douglas_Engelbart.webp" data-width="1400" data-height="465" data-singlew="8" data-singleh="" data-crop="" data-fixed="" />“Bien sûr je suis allé visiter quelques sites internet en tapant “souris” espace “Engelbart”. Puis plus généralement “souris d’ordinateur”. C’est un bon moyen de se brouiller les idées sur l’évolution de ce périphérique d’ordinateur. J’ai même trouvé un site intitulé “syndrome de la souris!” où l’on explique en long et en large tout ce qui peut vous arriver de terrible en utilisant un outil aussi dangereux. Mais je constate qu’il n’y est pas fait mention du modèle de la souris que je vais vous décrire, et dont je suis un peu l’auteur. Est-ce que sa forme hémisphérique était physiologiquement meilleure que toutes les autres? Ce serait bien prétentieux de l’affirmer. Mais pour l’avoir utilisée fort longtemps, je ne me souviens pas d’avoir eu de crampes ni autres douleurs consécutives à son usage. D’ici à dire que j’ai inventé la première souris ergonomique ne serait pas impossible. Qui peut se targuer d’avoir inventé la sphère, et encore moins l’hémisphère? Ce serait vraiment perdre la boule! Donc, concernant l’invention de la souris, un consensus apparaît très nettement. La première souris informatique était en bois et est née de l’esprit très avant-gardiste de Douglas Engelbart.”
“Bien imparfaite et fort mal pratique certes, cependant le concept est bien là, c’est-à-dire déplacer un curseur sur un écran d’ordinateur, sans utiliser les touches “flèches” du clavier. Ni plus, ni moins! Cela n’a l’air de rien, mais il a fallu pas mal de temps pour que les utilisateurs des machines informatiques de l’époque intègrent ce concept qui nous paraît maintenant parfaitement naturel, et qui consiste, en quelque sorte, à imaginer que notre main se déplace sur l’écran en entraînant avec elle une petite flèche toute virtuelle. C’est ce qu’on appelle un interface homme-machine.
Et puis, à cette époque du début du graphisme sur ordinateur, existaient déjà les tables graphiques, qui avaient un gros avantage sur la souris, à savoir: des repères absolus.”
Smaky et souris, des complices au long cours
“Lorsque je suis arrivé au Laboratoire de Calculatrices Digitales (LCD) en 1976, le titre même du labo donnait la préoccupation du moment, soit inventer et fabriquer des calculatrices électroniques pour remplacer les modèles mécaniques existants. Les réalisations américaines et japonaises dans le domaine ont vite fait de convaincre le professeur Nicoud de changer le nom de son labo en: LAMI, soit Laboratoire de Microinformatique (1980). Auparavant, les premiers micro-ordinateurs Smaky, abréviation de “SMArt KeYboard”, étaient nés.” Le premier-né de la longue lignée des Smaky, le Smaky 1, un clavier intelligent avec un écran, est fonctionnel à Noël 1974.
Smart Keyboard, clavier intelligent! André Guignard ouvre une petite parenthèse sur un thème brûlant d’actualité. “Cette notion pour qualifier d’intelligents des objets mécaniques ou électroniques existait déjà. C’est même à cette époque qu’est née “l’intelligence artificielle”, projet qui prévoyait ni plus ni moins que de fabriquer un cerveau artificiel, égal voire supérieur au cerveau humain. Comme vous le voyez on n’a pas fini d’en parler! Fin de la parenthèse.”
“Les Smaky, c’est une autre histoire, sinon qu’un jour le professeur Nicoud m’a dit: “Il faut fabriquer des souris pour les Smaky et d’autres ordinateurs! Ben voyons! J’avais tout ce qu’il fallait: un tour, une fraiseuse, une scie circulaire faite maison par mon ami Marc Hermanjat, et même un petit atelier capable de fabriquer des circuits imprimés. Il n’y avait plus qu’à… Mais là, vous n’allez pas y couper d’un peu de théorie!”

1976, année de l’arrivée d’André Guignard au LCD, est celle du Smaky 4, mis en réseau, une première! Photo: un Smaky 4 fabriqué par André Guignard, avec le prototype du lecteur de cassette inventé pour le Scrib (futur Smaky 5, 1977) | © Musée Bolo
Partie technique: pour ne perdre la boule!
“Je crois qu’il n’y a rien de plus anti-mécanique qu’une souris.”
En Suisse, seul le laboratoire du professeur Nicoud s’intéressait à la souris. Depuis 1974, plusieurs prototypes s’étaient succédé. Lorsqu’en 1979, André Guignard s’attelle à la conception de la souris mécanique hémisphérique, pour répondre à une commande du professeur Niklaus Wirth (ETHZ) d’une trentaine de souris pour sa station de travail Lilith, “la souris à boule mécanique (tiens encore une boule!), existait déjà.”
Théorie. “Je crois qu’il n’y a rien de plus anti-mécanique qu’une souris. Tout comme une montre! Tous les mécaniciens théoriciens vous le diront, une montre ne peut pas fonctionner. Pour la montre, il y a en effet beaucoup, beaucoup trop de frottements pour qu’elle tourne.»
Preuve contraire. Et pourtant, la montre de poche 17 lignes fabriquée en 1960 par l’apprenti horloger André Guignard, et reconnue chronomètre d’observatoire, certifiée officiellement dans sa précision de marche, fonctionne toujours très bien!
Explications. “Dans une montre, la force se transmet par choc élastique, où les frottements sont négligeables.”
Démonstration. “Je ne résiste pas au plaisir de vous faire la démonstration d’un transfert d’énergie par choc élastique, qui est le cas de toutes les montres. Selon la formule (ci-contre): où Q exprime la quantité de mouvement, dans le cas de transmission d’énergie par choc parfaitement élastique nous pouvons écrire:
Dans ma démonstration, nous pouvons supprimer les vecteurs, car tout est aligné. A masses égales, ce qui est le cas en l’espèce, m1 = m2, et les vitesses sont donc égales.”
Explications. “La vitesse de la première bille que je fais rouler sur ce petit bout de rail va être transmise à la bille extérieure, et les vitesses, comme les masses sont égales, doivent être égales. Je roule doucement la première bille qui vient heurter la seconde bille, qui arrivée au bout du rail tombe dans une boîte. On dirait que la deuxième bille va beaucoup plus vite que la première (rires!) On dirait! En fait, non! C’est une illusion, car la première bille, en arrivant sur l’aimant placé en amont de la seconde bille, est fortement accélérée par son champ magnétique, si bien que lors de l’impact, la vitesse de la première bille est en effet égale à celle de la seconde bille. Vous avez donc pu voir que l’énergie est transmise directement d’une bille à l’autre.”
Et la souris?
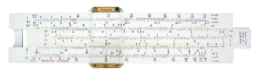
“Bon! Rien de tout cela pour la souris; c’est un système quasi statique qui contrairement à une montre, ne fonctionne qu’à cause des frottements. Pour l’horloger que je fus, c’est assez frustrant! Je n’ai jamais essayé de modéliser ce système mécanique. En admettant que j’en aie été capable, ce qui est moins sûr! (rires!). Nous ne disposions pas, à l’époque, de ces logiciels modernes de simulation mécanique, capables de tels calculs. N’oublions pas que tous nos calculs étaient faits à l’aide de la table de logarithmes, ou de la règle à calculs, qui n’est rien d’autre qu’une application graphique des logarithmes” explique André Guignard en nous montrant une règle à calcul, objet qui a disparu depuis longtemps de nos bureaux.
 Wikimedia)" data-uniqueid="13620-214795" data-guid="https://www.museebolo.ch/wp-content/uploads/2023/10/Roger_McLassus_Sliderule_2005.webp" data-path="2023/10/Roger_McLassus_Sliderule_2005.webp" data-width="1600" data-height="462" data-singlew="800" data-singleh="" data-crop="" data-fixed="width" />
Wikimedia)" data-uniqueid="13620-214795" data-guid="https://www.museebolo.ch/wp-content/uploads/2023/10/Roger_McLassus_Sliderule_2005.webp" data-path="2023/10/Roger_McLassus_Sliderule_2005.webp" data-width="1600" data-height="462" data-singlew="800" data-singleh="" data-crop="" data-fixed="width" />“Les machines à calculer d’alors étaient tout juste capables d’effectuer les quatre opérations de base, soit addition, soustraction, multiplication et division. A la mesure de l’ère informatique, la souris mécanique est une antiquité et il y a longtemps que plus personne ne l’utilise. Donc, aucun intérêt de la modéliser. Par conséquent, on ne saura jamais si elle peut fonctionner!”
Souris et locomotives, ça roule!
“Essayons tout de même de comprendre comment fonctionne une souris mécanique. Pour cela il faut savoir que la force de frottement d’un corps sur une surface dépend de deux facteurs: premièrement, la force d’appui (f) et, deuxièmement, le coefficient de frottement (mu). Il dépend de la nature des objets en contact et varie fortement en fonction des conditions d’humidité, de température, et également dans le temps. Le frottement dynamique est plus fort au démarrage du mouvement. Ce phénomène s’appelle stick-slip, en anglais, en français: collage au démarrage.
C’est pourquoi une souris, une vraie cette fois-ci, avec ses vingt grammes ne glisse pas sur le parquet quand elle court, et qu’une locomotive doit peser ses cent-cinquante tonnes pour ne pas patiner sur les rails au démarrage ou lors de traction dans une pente. Si vous cherchez un rapport entre une souris et une locomotive (électrique ou à vapeur), le voici: la bille!”
“En effet, la bille utilisée pour équiper la souris mécanique correspond aux billes en acier des grands roulements à billes, qui équipent le matériel roulant des chemins de fer, dont les locomotives. Sa masse, donc son poids important, compensait son faible coefficient de frottement pour une adhésion acceptable sur les surfaces lisses d’un bureau. Une bille en caoutchouc aurait été préférable, mais je ne disposais pas, à l’époque de billes en polymère assez précise pour rouler sans à-coups.”
La souris mécanique – Un subtil réglage des forces
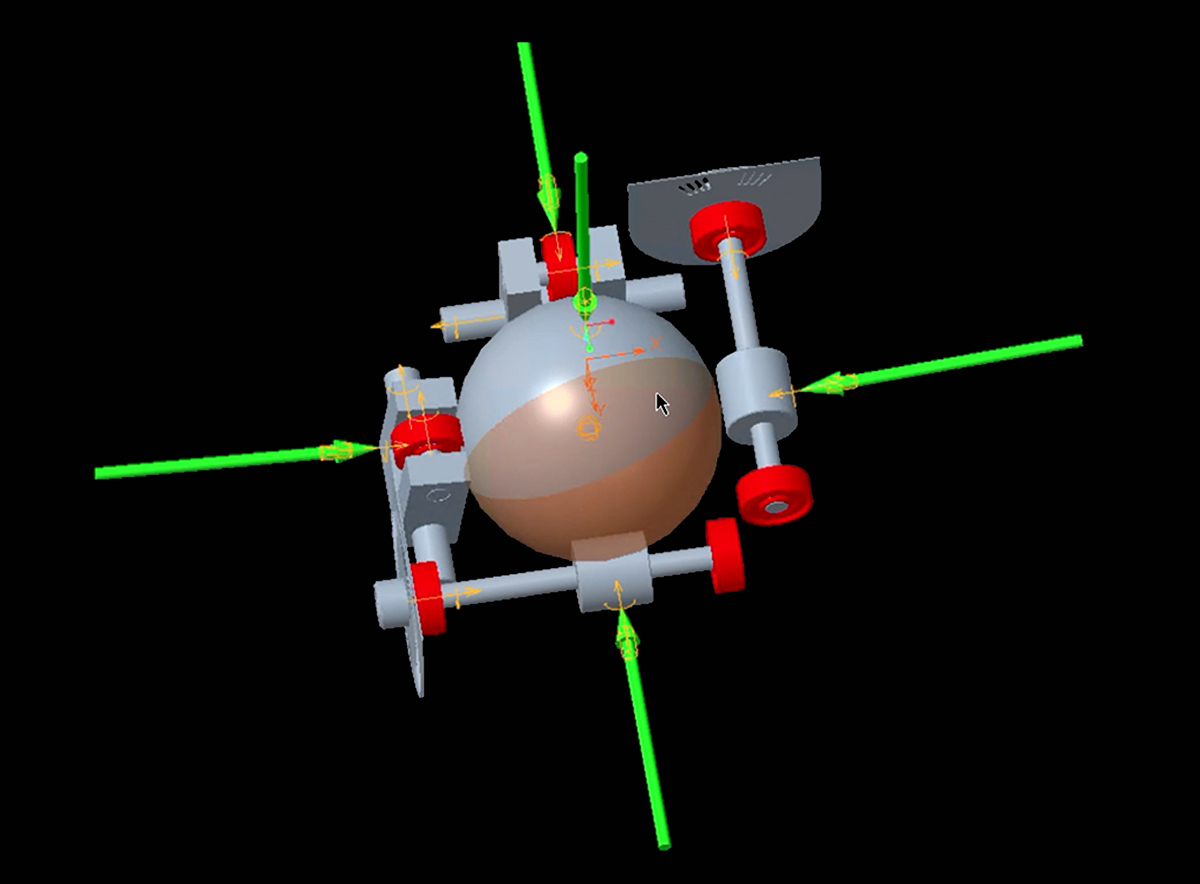
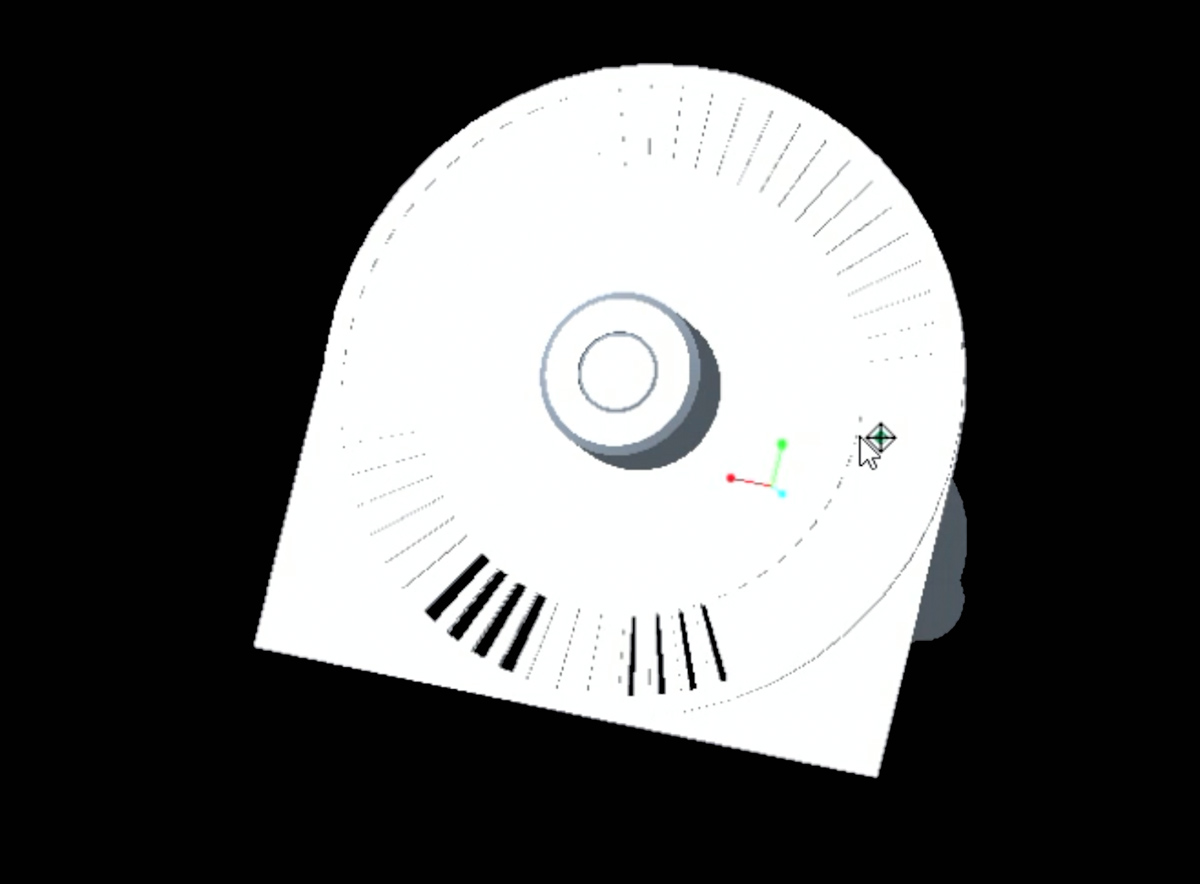
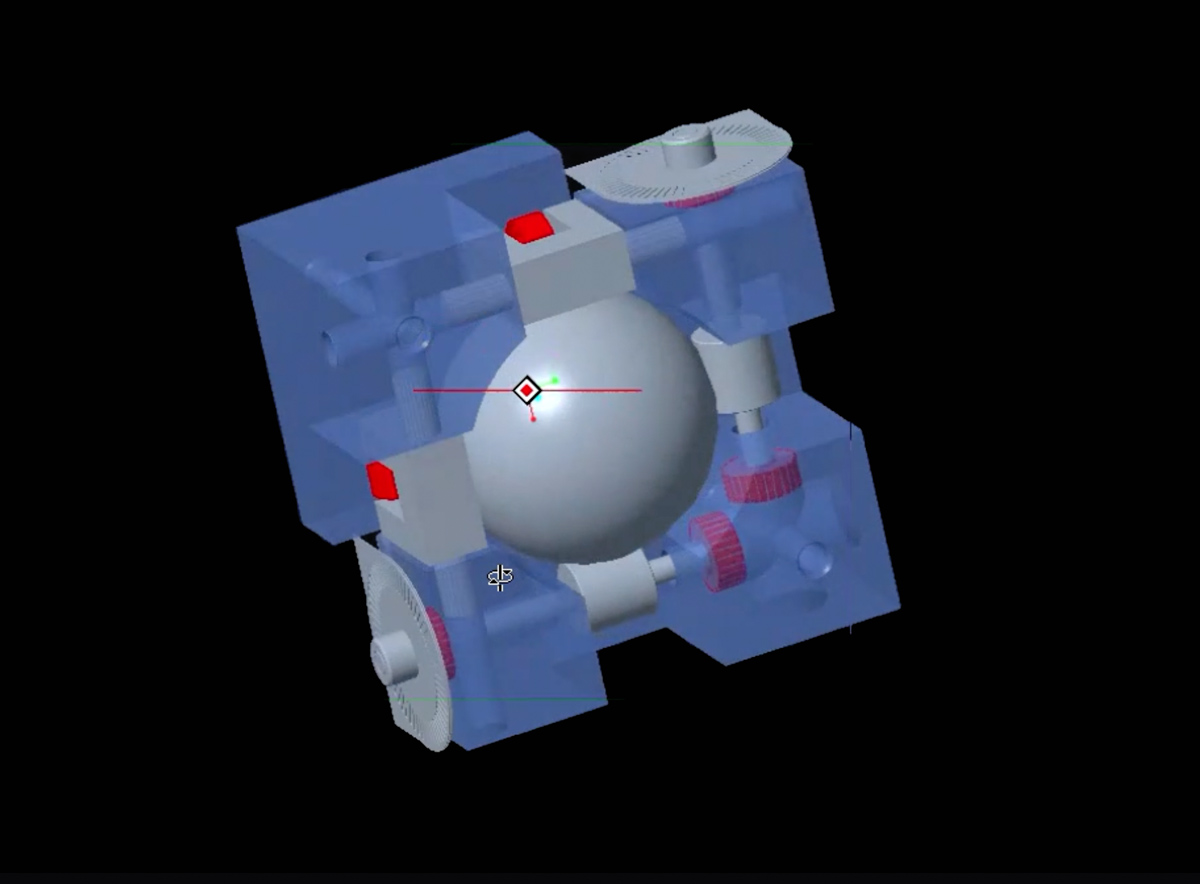
André Guignard explique le principe de fonctionnement de la souris mécanique à l’aide d’une esquisse en 3D qu’il a préparée spécialement pour la Nuit des Musées.
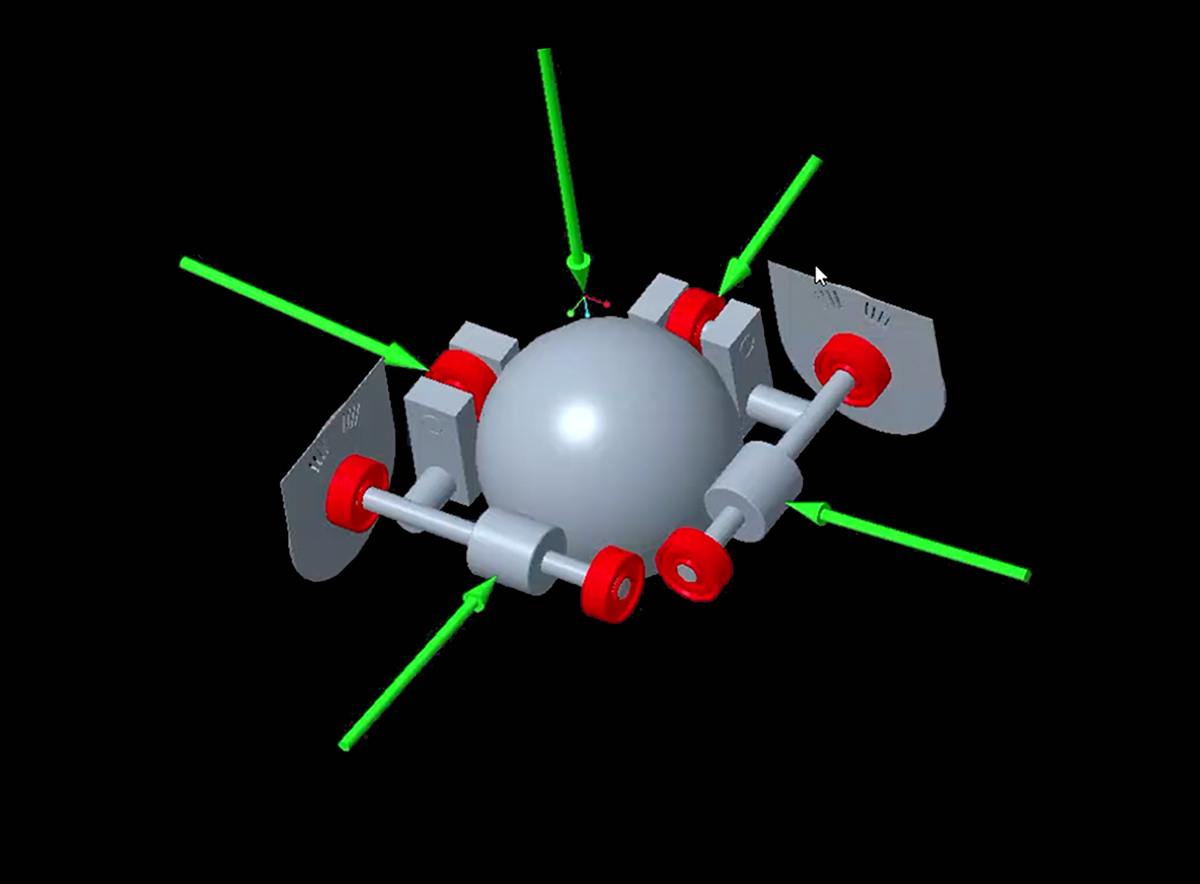
Vecteurs latéraux. « J’ai matérialisé les forces principales qui entrent en jeu dans le fonctionnement de la souris, sous la forme de ces flèches vertes, qui représentent les vecteurs de forces. Le système est en équilibre, car toutes les forces s’annulent. Vous avez sur la gauche un système qui appuie sur la bille. Voilà, je le fais se déplacer, avez une force qui est due à un ressort. Cette force est reprise de l’autre côté, à droite, par ce galet tournant, qui est relié à un capteur. On a la même chose pour l’autre axe (sud-nord).”
Vecteur vertical. « Et enfin, cette flèche verticale (sur le dessus) représente la force de la pesanteur de la bille qui appuie sur le sol, ainsi que l’addition de la composante verticale des quatre vecteurs sur les appuis. Ce vecteur est compensé par la réaction du sol (non représentée). »
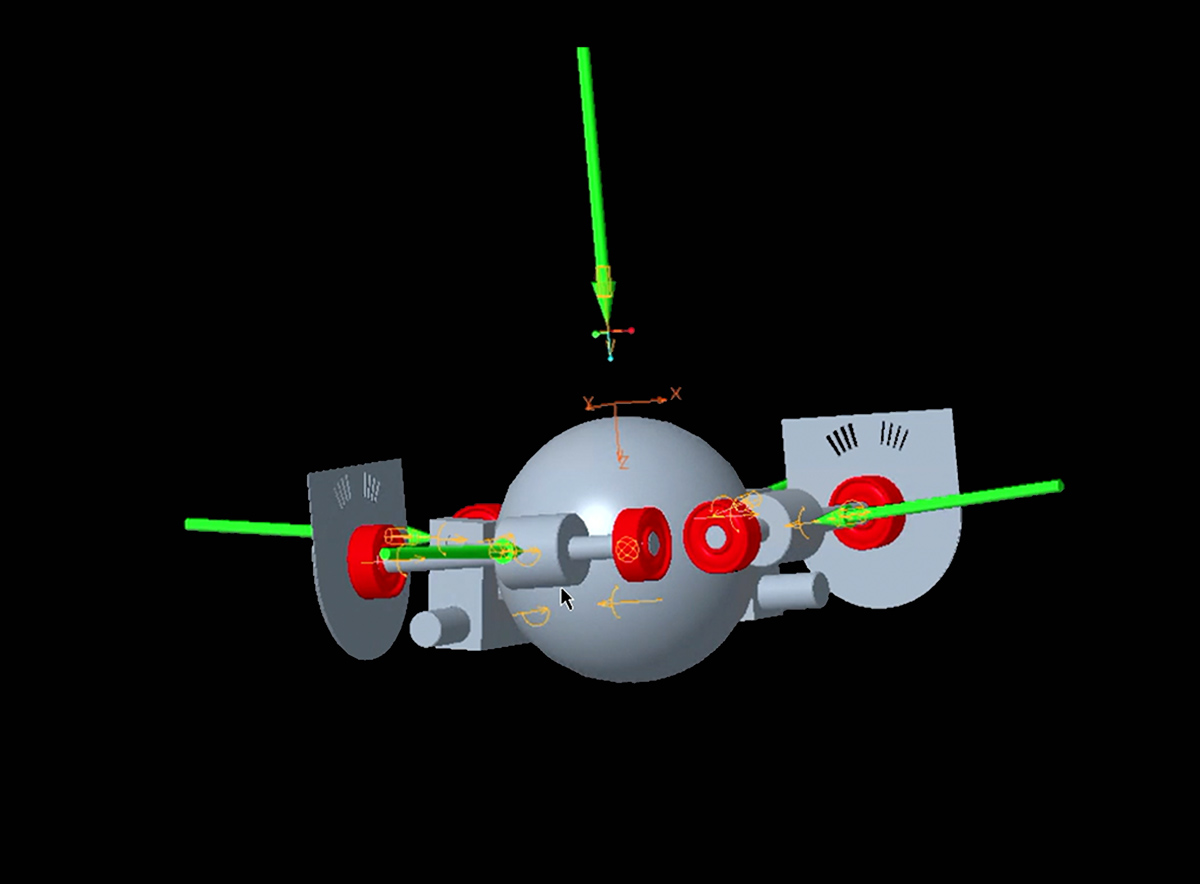
Tourner sans glisser. “Le frottement de la bille sur le sol doit être suffisant pour que celle-ci tourne, lorsqu’on la pousse, sans glisser. En tournant, la bille doit entrainer un galet, relié à un capteur, qu’on va étudier tout à l’heure. En effet, lorsque je tourne la bille de cette manière (droite-gauche sur l’image), elle doit glisser sur cet axe (sud-nord).”
Tourner en glissant partiellement. “En revanche, la bille doit glisser partiellement, si le mouvement de rotation n’est pas perpendiculaire à l’axe du capteur. Lorsque je déplace la bille en travers, en diagonale, elle doit partiellement glisser et partiellement entraîner les capteurs.”
“Suivant le sens de rotation, la bille aura tendance à se décoller du galet capteur, d’où un contre-galet d’appui. D’où le fait que j’ai dit que le système le système de souris à bille, est très mal foutu!” souligne André Guignard (rires dans le public!).
Subtils réglages des forces. “L’ensemble, comprenant deux capteurs orthogonaux, ne fonctionne que grâce à de subtils réglages des forces d’appui des contre-galets. En effet, si la force d’appui est trop grande la bille est bloquée dans un axe, si elle n’est pas assez grande, elle patine sur les galets et donc elle ne transmet pas son mouvement.”
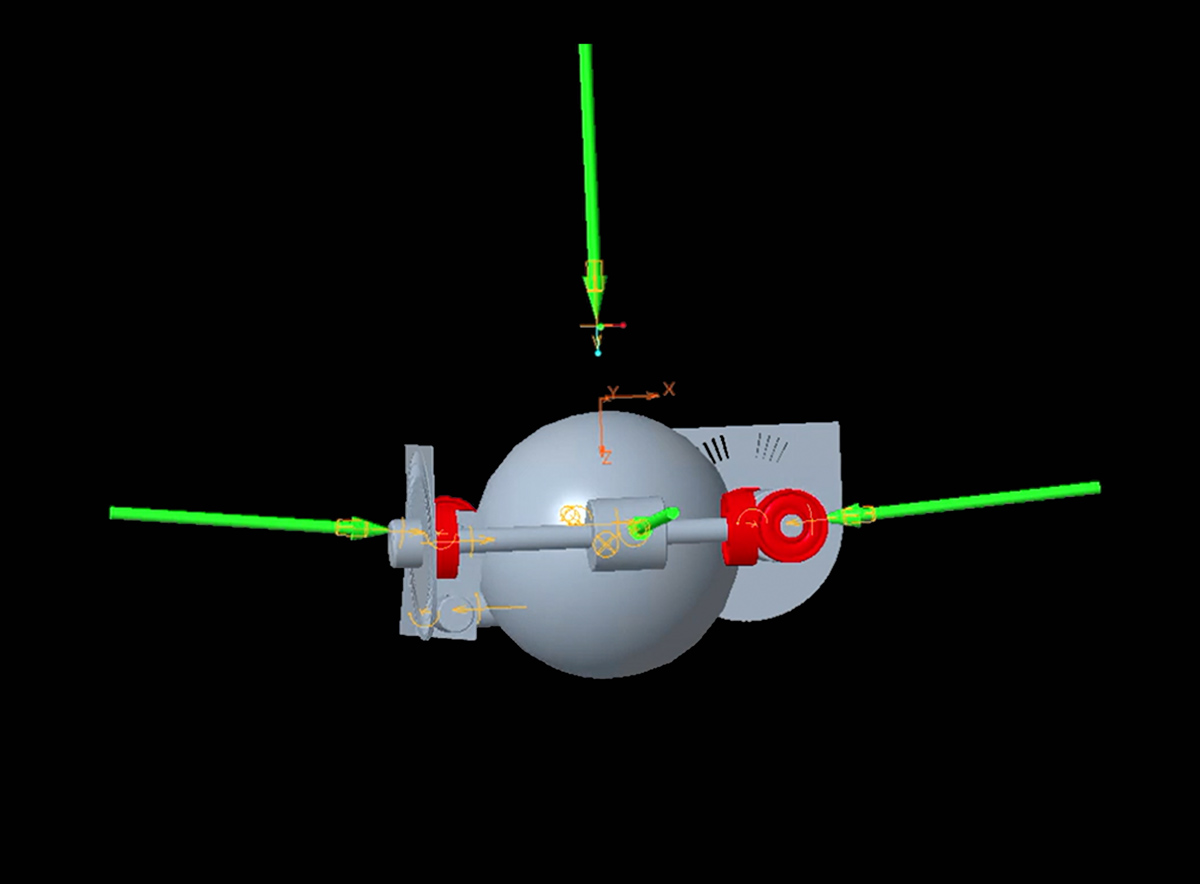
“Ainsi, vous remarquez que les axes des galets se situent sur un plan placé au-dessus de l’équateur de la bille afin de créer une force d’appui supplémentaire sur la bille. En cas de forte accélération de la souris, il arrive que le mouvement ne soit pas transmis. Mais ce n’est pas très grave, tout le système souris-écran-ordinateur étant interactif, le cerveau humain corrige les erreurs sans problème.”
“Assez parlé de mécanique, passons aux capteurs!” propose André Guignard, en nous entraînant dans la suite de cette plongée au cœur du fonctionnement de la souris mécanique.
“Très vite, l’utilisation d’un capteur incrémental s’est imposée!”
Retour aux sources. “La première souris d’Engelbart était munie de potentiomètres.”

“Le potentiomètre transforme un mouvement rotatif en une variation de résistance électrique. C’est ce qu’on appelle un capteur absolu. A chaque valeur de l’angle de rotation du potentiomètre correspond une valeur et une seule de résistance. Résultat: avec la souris d’Engelbart, une fois qu’on s’était déplacé d’une certaine quantité, il fallait faire le chemin inverse avec sa souris pour revenir au centre de l’écran. Il n’y avait pas moyen de faire autrement. Il fallait à tout bout de champ (expression qui convient fort bien!) tourner les roues à la main ou sur une surface pour continuer à utiliser sa souris. Très vite, l’utilisation d’un capteur incrémental s’est imposée. Un capteur incrémental donne un signal électrique proportionnel à l’angle de rotation, indépendamment de sa position angulaire absolue. Un modèle américain de souris utilisait un capteur mécanique, semblable à un collecteur de moteur à courant continu. Ce type de capteur, outre son prix très élevé, était très limité dans le nombre de pas par tour et dans la détection du sens de rotation, dont je vais justement vous parler. Un capteur incrémental simple donne une valeur de l’angle de rotation, quel que soit le sens de cette rotation. Pour lever l’ambiguïté du sens de rotation, le capteur doit fournir deux signaux, déphasés de 90 degrés, soit un quart du pas de définition. Je vais vous expliquer cela rapidement” conclut André Guignard en nous présentant, d’abord, la modélisation d’un capteur incrémental simple.
Capteur simple à 20 pas. “Ce capteur dont vous distinguez des ouvertures sur les côtés, est placé en face d’une autre ouverture. Et si on place une photodiode d’un côté, un phototransistor de l’autre, on obtient un signal électrique variable (sinusoïdal) à chaque passage de la fenêtre, Là, on a vingt pas par tour, c’est ce qu’on appelle sa définition, ce n’est pas suffisant!”
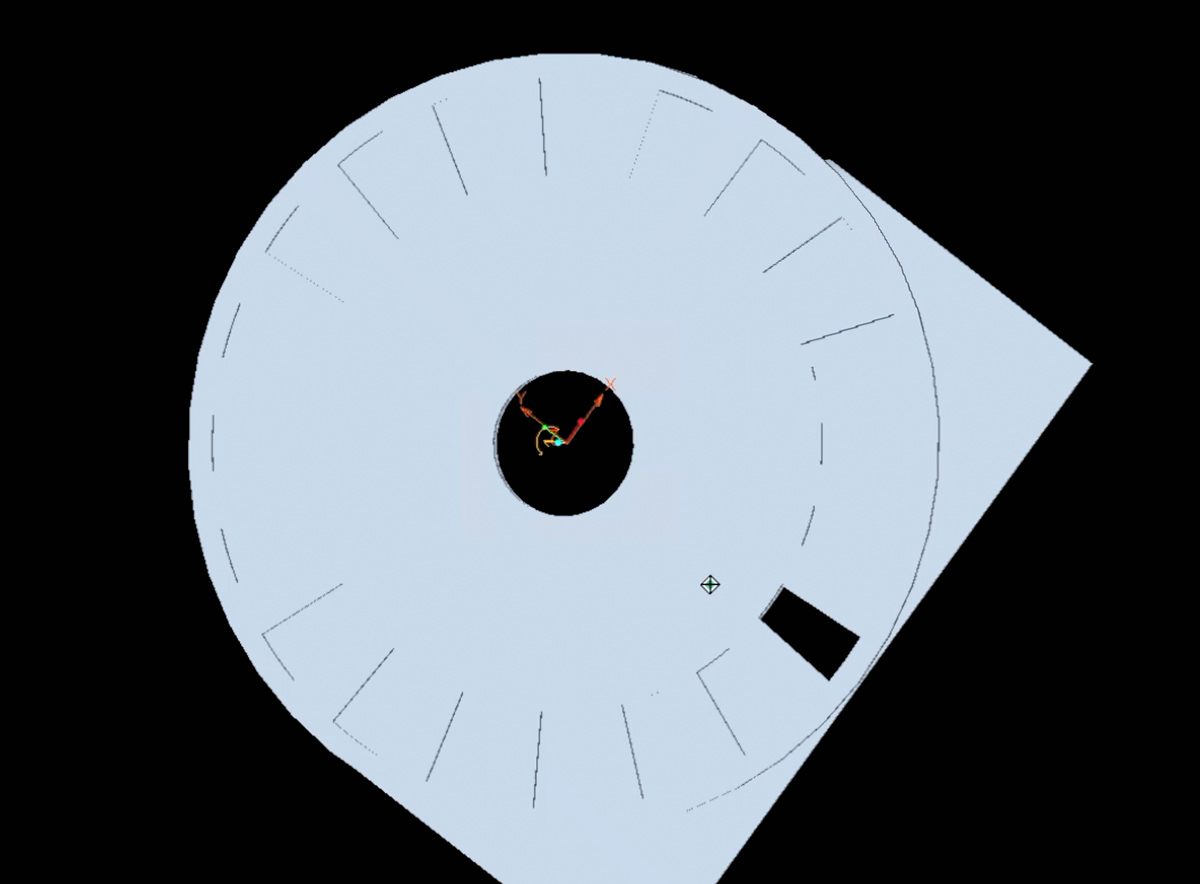
Capteur à 60 pas. “Pour augmenter la résolution, le nombre de pas par tour, on utilise des roues qui ont plus de dents, ici en l’occurrence soixante. Il faut également mettre de l’autre côté un masque qui permet d’augmenter le contraste entre positions ouverte-fermée lorsque l’on tourne la roue sans quoi le signal sera trop faible. Sans cela le phototransistor ne lira qu’une valeur moyenne de la lumière reçue. Ainsi, on obtient un signal complet à chaque passage d’un soixantième de tour.”
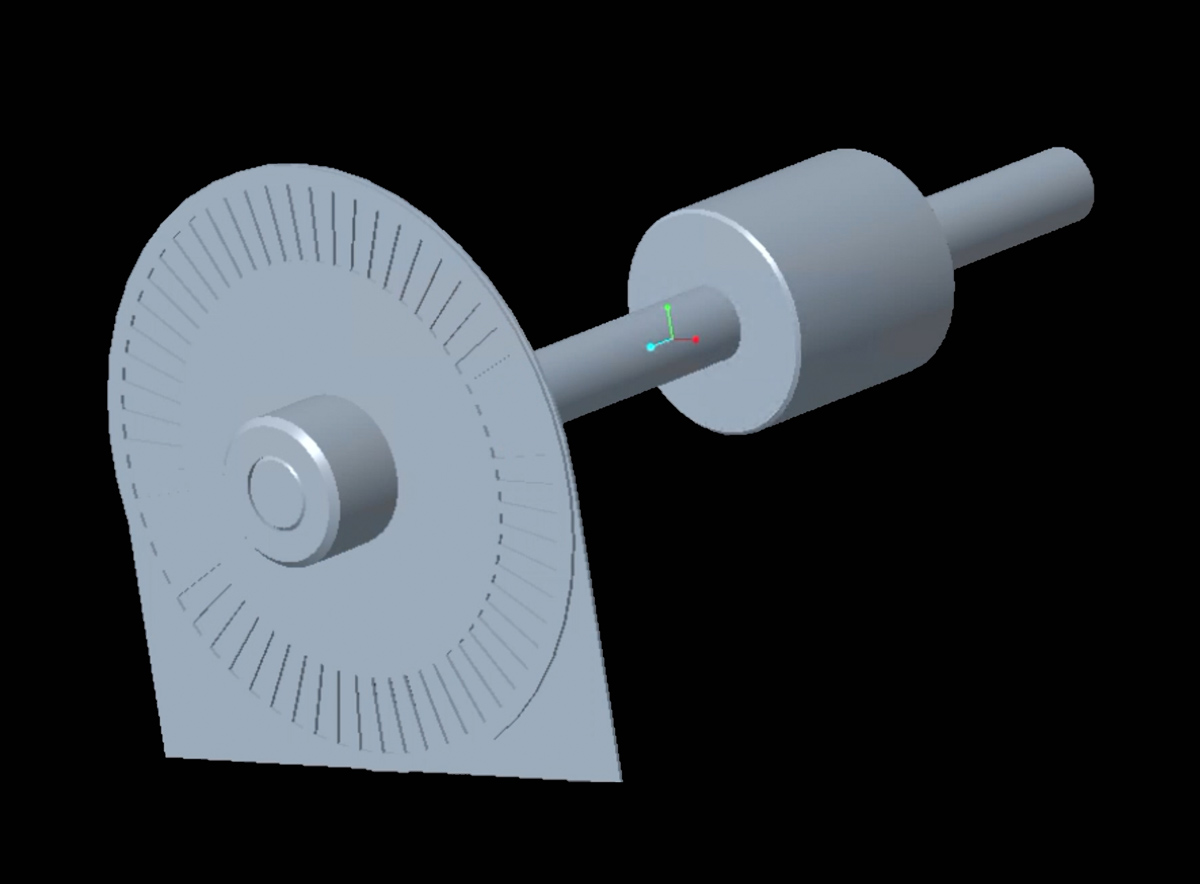
Mais, dans quel sens tourne-t-on?
Sens de rotation. “Avec tout ça, on ne sait pas dans quel sens on va. Qu’on aille dans un sens ou dans l’autre, le signal est identique. Pour y remédier, on va être obligé de mettre deux capteurs sur la même roue codeuse de manière à ce que l’un après l’autre soit allumé. Selon le sens de rotation, on pourra savoir dans quel sens on tourne. Le deuxième système complet installé donne le même signal mais décalé dans l’angle d’un quart de la valeur de la résolution, de manière à fournir le signal voulu. Déjà à l’époque, les ordinateurs étaient incapables de lire directement des signaux analogiques, tels les sinus représentés sur l’image ci-dessous.”
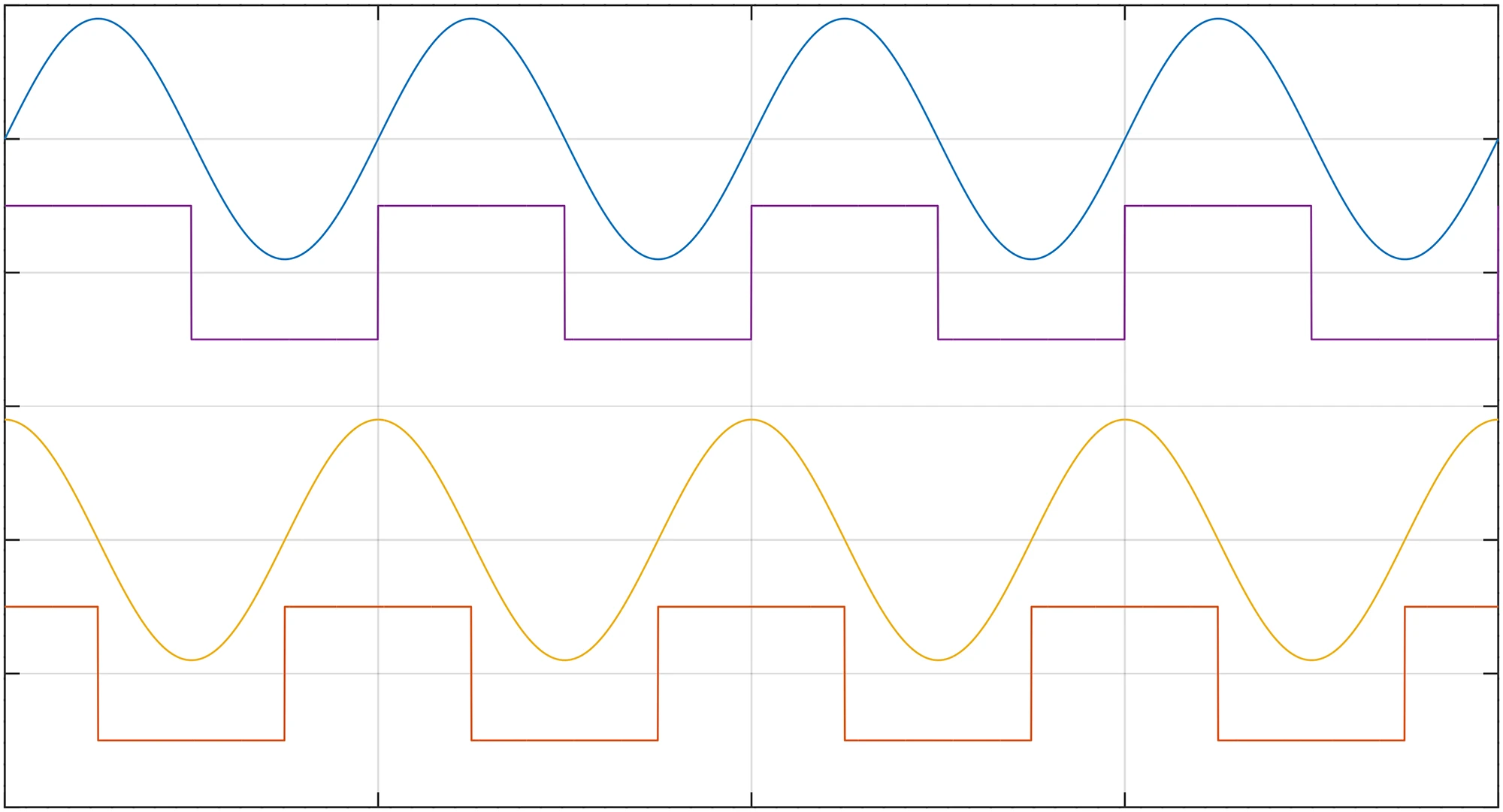
A mon signal! “Les capteurs donnent deux signaux sinusoïdaux qui sont déphasés de 90 degrés, c’est-à-dire que l’un arrive avant l’autre et suivant le sens de rotation, on sera décalé dans un sens ou dans l’autre. Il suffira à ce moment-là, électroniquement c’est très simple, d’abord de transformer les sinus en carrés au moyen de ce qu’on appelle un trigger de Schmidt (Bascule D). Ensuite, pour lire le sens de rotation, il suffira, au moyen d’une simple bascule D, au passage d’une des dents de lire la position du deuxième capteur au moment de la transition du premier, état qui nous indique directement le sens de rotation. Dans un sens on aura un 1, dans l’autre sens on aura un 0.”
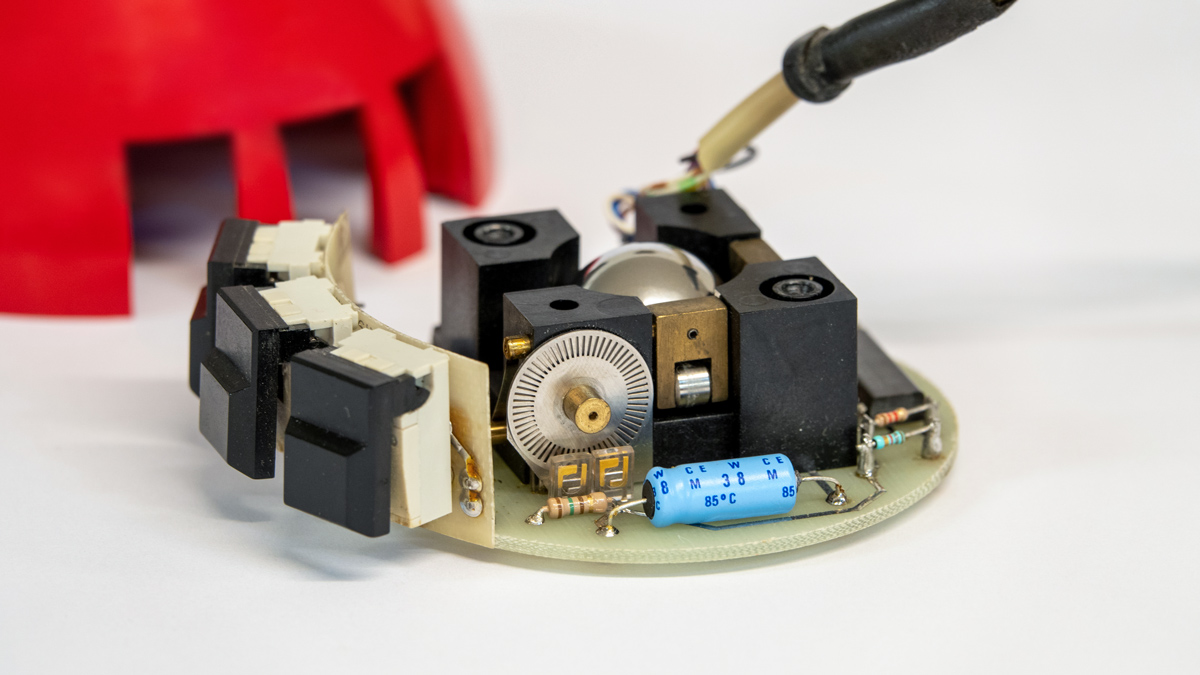
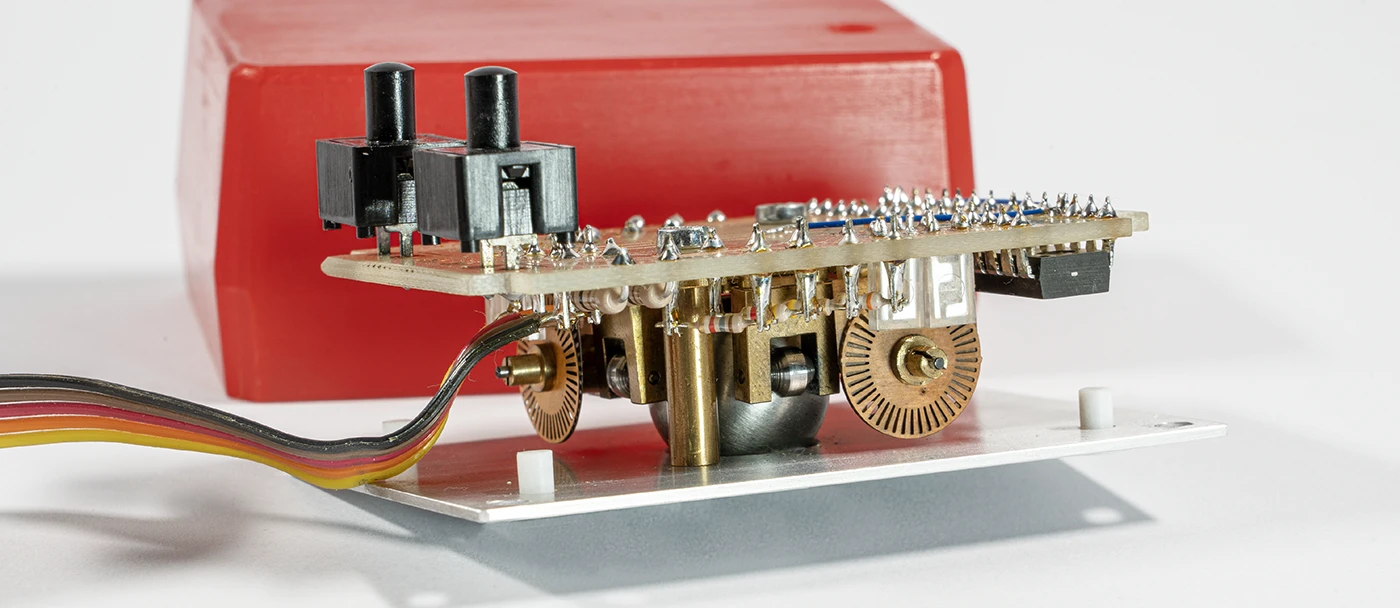
Intérieur de la souris 4 fabriquée par Dépraz. Au premier plan, un capteur incrémental (roue à rainures) devant lequel se trouvent deux diodes électroluminescentes infrarouges | © Musée Bolo. Les méthodes de fabrication des capteurs incrémentaux ont évolué: “Dans les cinquante premières souris que j’ai fabriquées, les capteurs optiques étaient faits avec des films photo, produits par l’atelier de circuits imprimés de l’EPFL. Par la suite, les capteurs des souris Dépraz étaient fabriqués par usinage chimique dans de la tôle d’acier inox.”
Une souris dessinée à la pointe d’un crayon dans un atelier de mécanique unique
“Voici un exemple de dessin tel qu’on les faisait à l’époque, en l’occurrence le dessin de la souris.” Plans dessinés à la main par André Guignard et le résultat final: une souris hémisphérique rouge | © LAMI
Pas de conception assistée par ordinateur (CAO)! “Comme je vous l’ai dit tout à l’heure, les moyens à disposition des ingénieurs à l’époque étaient, côté conception, un crayon, une planche à dessin, une équerre graduée montée sur un pantographe.”
 portrait . " data-uniqueid="13687-184119" data-guid="https://www.museebolo.ch/wp-content/uploads/2023/10/Musee_Bolo_Andre_Guignard_Moule_DP.webp" data-path="2023/10/Musee_Bolo_Andre_Guignard_Moule_DP.webp" data-width="1400" data-height="879" data-singlew="6" data-singleh="3.375" data-crop="1" data-fixed="" />
portrait . " data-uniqueid="13687-184119" data-guid="https://www.museebolo.ch/wp-content/uploads/2023/10/Musee_Bolo_Andre_Guignard_Moule_DP.webp" data-path="2023/10/Musee_Bolo_Andre_Guignard_Moule_DP.webp" data-width="1400" data-height="879" data-singlew="6" data-singleh="3.375" data-crop="1" data-fixed="" />“J’ai fabriqué les boîtiers dans un moule de coulage puis les ai usinés pour faire les deux plats sur le côté et les dégagements pour les trois interrupteurs. La matière de coulage est de la résine époxy colorée (Araldit)” expliquait André Guignard en 2021 | © Musée Bolo
“La clé, c’est l’outil!”. “Même les boîtiers hémisphériques ont été moulés un à un, en résine époxy, au moyen du moule que vous pouvez voir sur cette photo. Moule maison d’ailleurs!” Horloger de formation, André Guignard est capable de fabriquer les outils dont il a besoin.
Visite guidée!
L’atelier d’André Guignard. “La planche utilisée pour dessiner le plan que vous voyez ci-dessus, a disparu depuis longtemps. Par contre, tours, fraiseuses et scie n’ont pas pris une ride, et sont encore en usage, juste à l’étage au-dessus! Les imprimantes 3D que vous pourrez voir également là-haut, font pâle figure à côté des vénérables Aciéra et Schaeublin qui restent irremplaçables. C’est avec plaisir que je vous ferai visiter ce vénérable atelier de mécanique qui a vu la fabrication des cinquante premières souris mécaniques issues de l’EPFL.” Invitation acceptée!

La souris hémisphérique: présentation 3D
“Bien que j’aie étudié plusieurs modèles de souris, je vais vous montrer le modèle de souris qui avait été retenu pour fabriquer les cinquante premières souris appelées “P4”. Petite parenthèse: P comme parallèle. Cela veut dire que les signaux qui émanent de la souris sont transmis directement à l’ordinateur. René Sommer a très vite compris qu’il fallait faire de la souris un périphérique autonome et universel en le munissant de son propre processeur. Fin de la parenthèse.”
La souris P5. “Après la souris hémisphérique dont je vais vous parler dans un instant, j’ai étudié d’autres modèles avec une recherche de miniaturisation orientée fabrication de type horloger. C’était dans l’idée d’intéresser les entreprises horlogères qui cherchaient à se diversifier en pleine crise de l’arrivée de la montre à quartz. Mais personne ne s’est intéressé à ce modèle qui est resté sous forme de prototype. Elle ne fonctionne plus.”
Septembre 2023, renaissance de la souris hémisphérique
Grâce aux possibilités de la conception assistée par ordinateur (CAO), André Guignard nous a préparé une surprise de choix! «Je me suis amusé à redessiner ou plutôt, en utilisant un anglicisme à la mode redesigner la souris 4. En quelques jours, j’ai refait le chemin qui m’avait pris des mois à l’époque. Voilà ce que ça donne! On va la déshabiller ensemble.”
“Tout d’abord enlevons le boîtier, puis les plaques de fond, ça y est!”
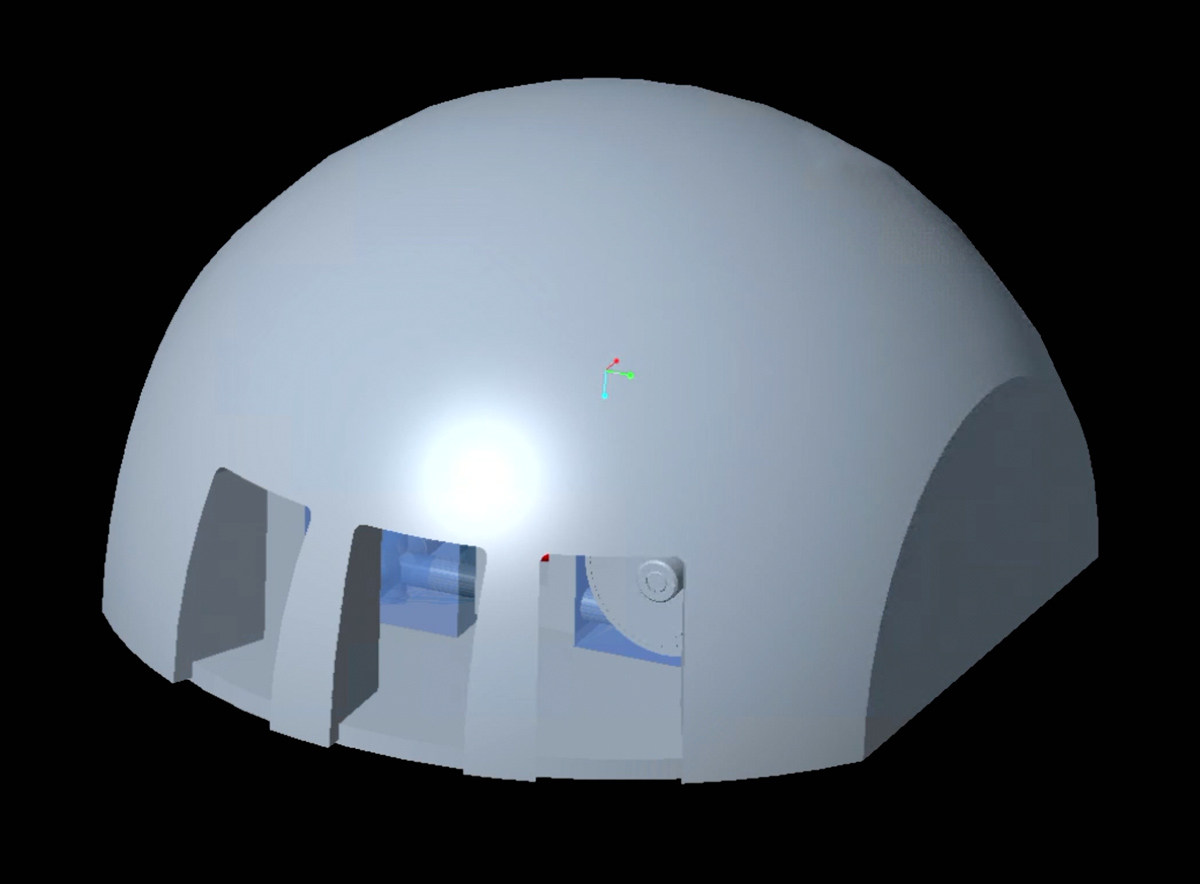
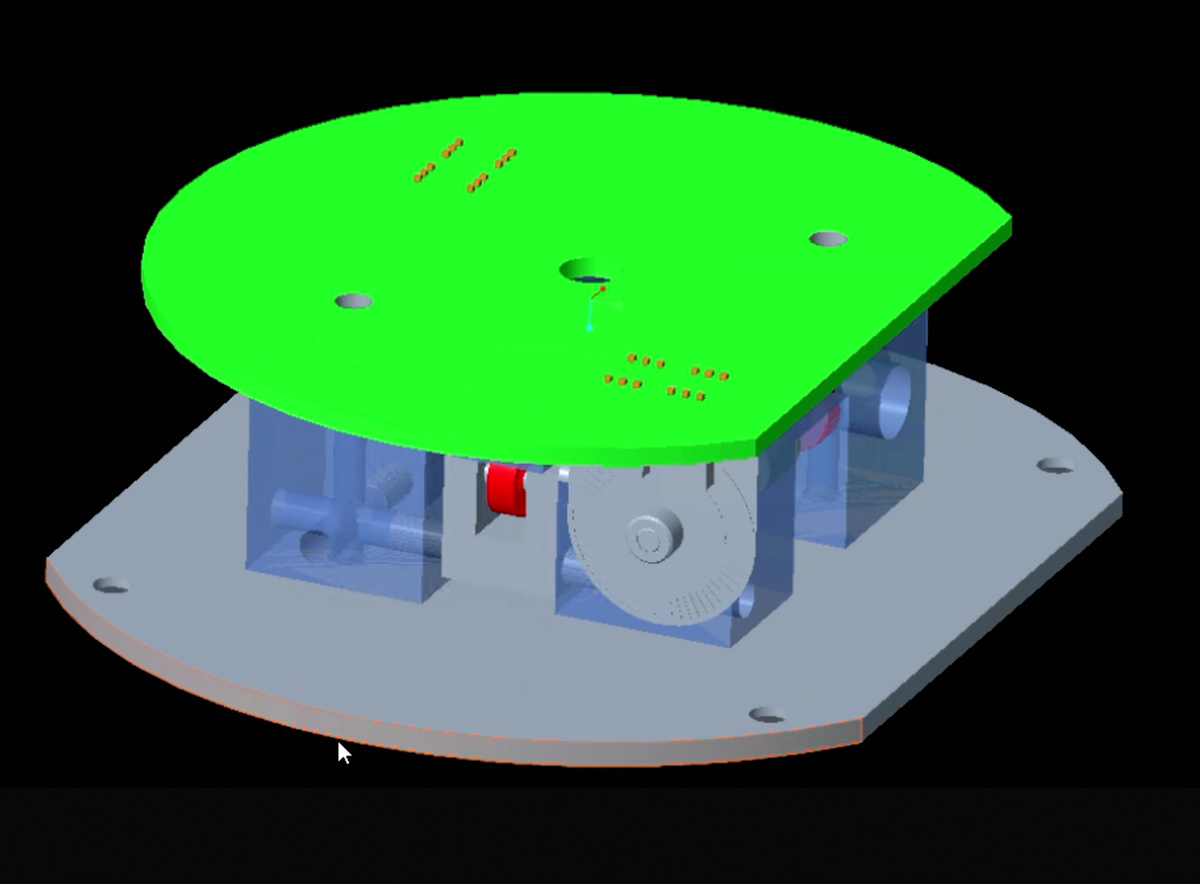
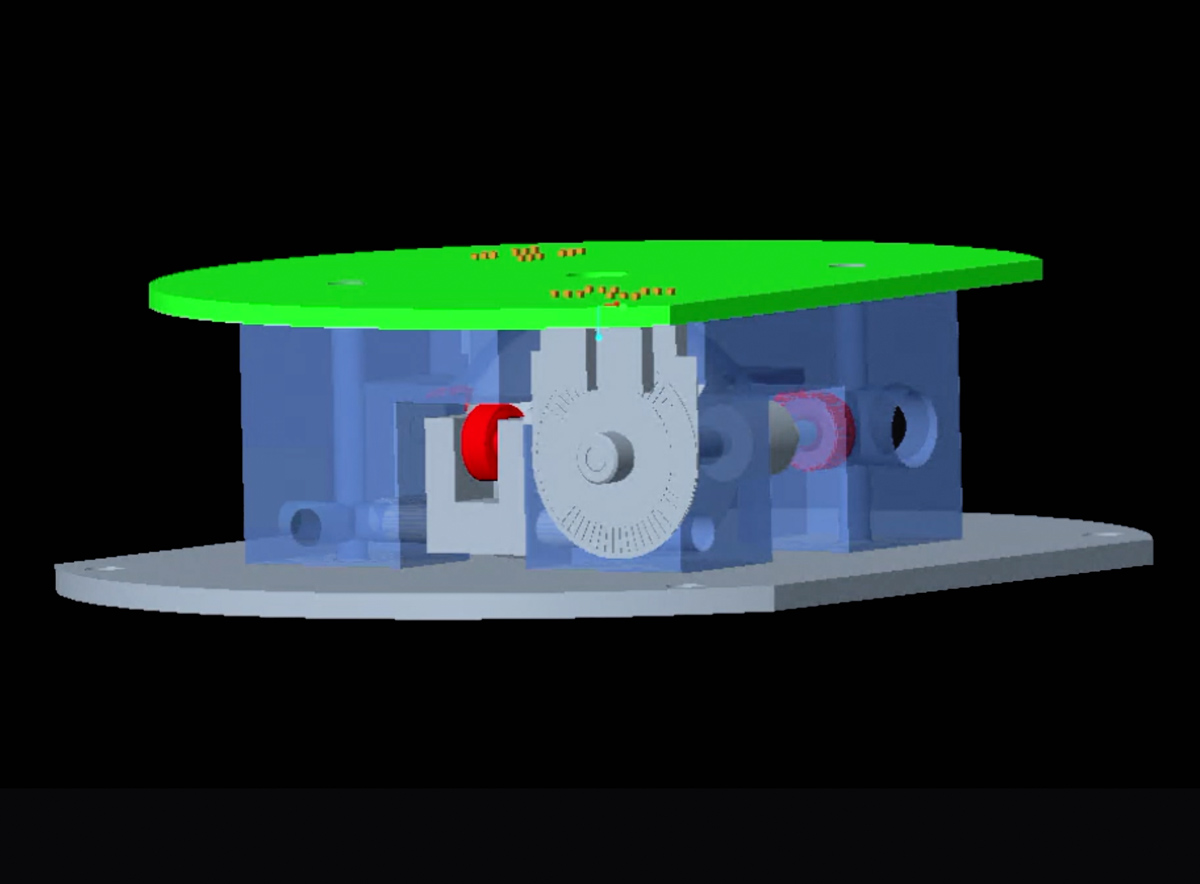
La souris hémisphérique conçue par ordinateur dévoile son intérieur | © André Guignard
“Voilà ce que ça donne en conception 3D, qui est exactement identique à ce qu’on pouvait faire à l’époque, mais en dessinant évidemment à la main!”
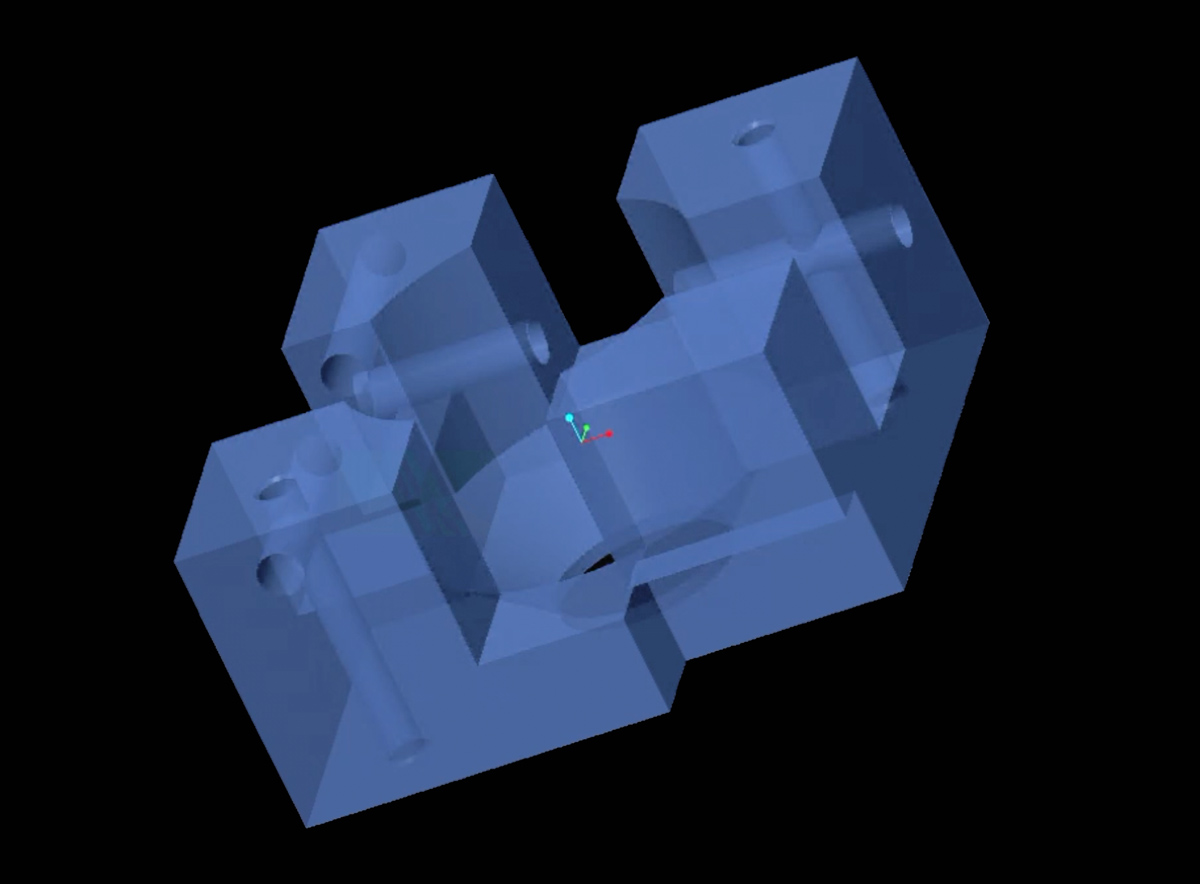
Pour notre plus grand plaisir, la démonstration continue: “Je peux vous montrer rapidement comment est-ce que l’on fait pour fabriquer virtuellement une pièce comme le bloc support mécanique.”
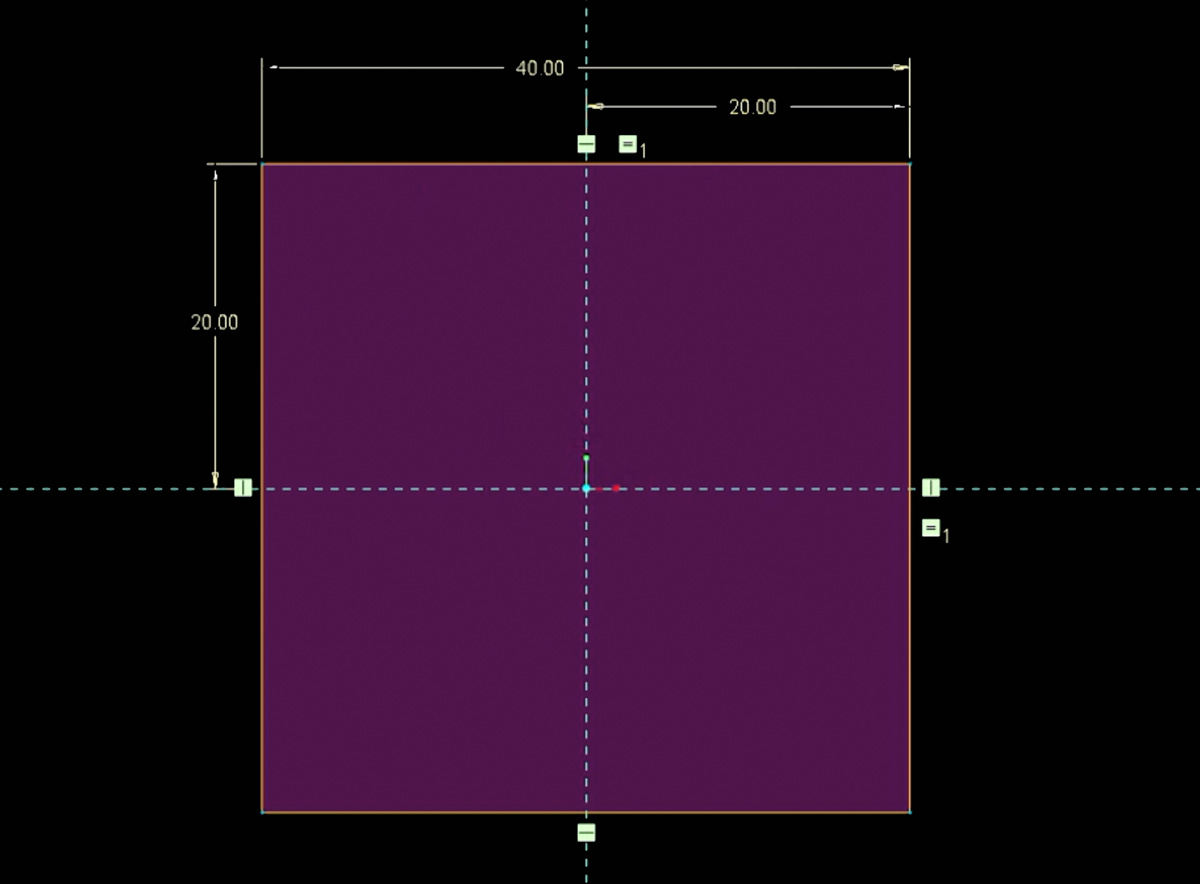
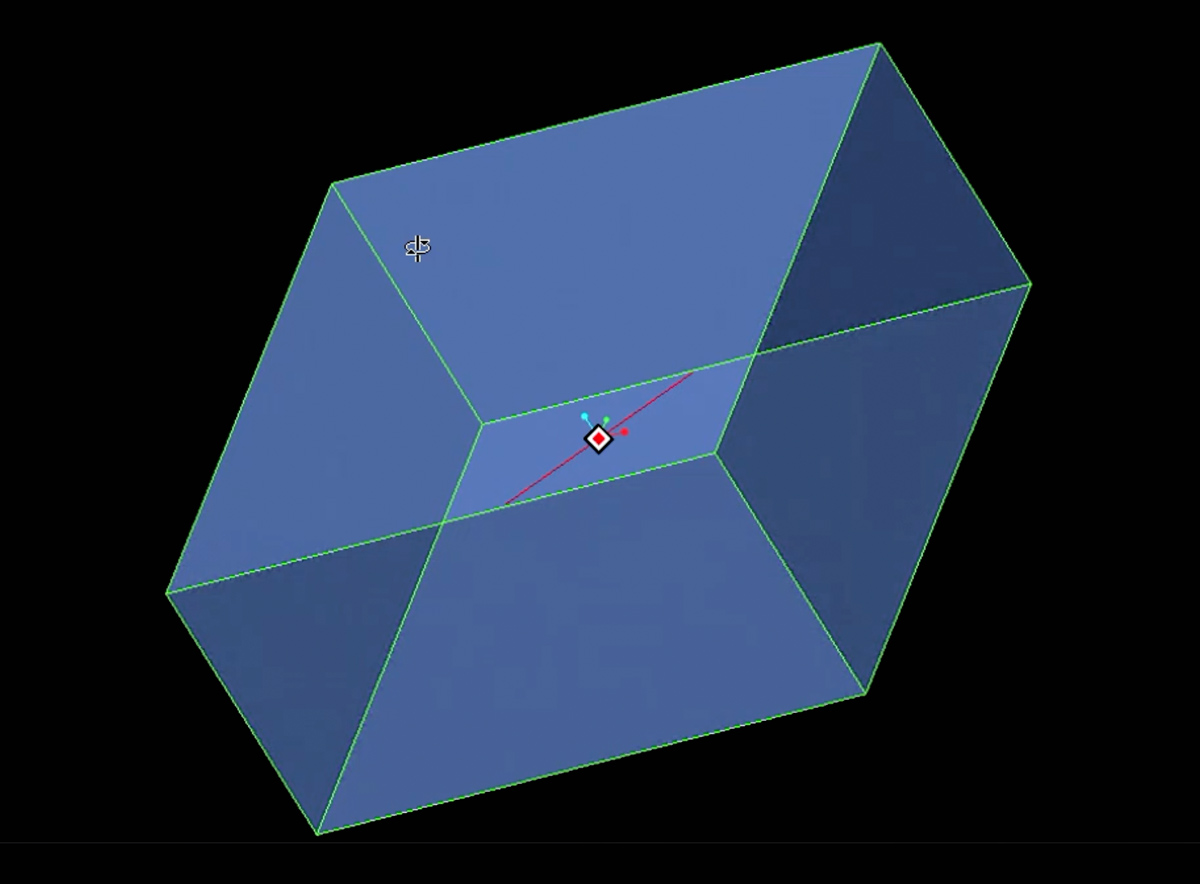
Point de départ: un bloc
Étape 1 – Conception du bloc. “Au départ on dessine, en l’occurrence, un carré. On lui donne des dimensions. On valide le carré. On lui donne une certaine épaisseur, dans ce cas 20 mm. Et voilà, on a fabriqué un bloc!”
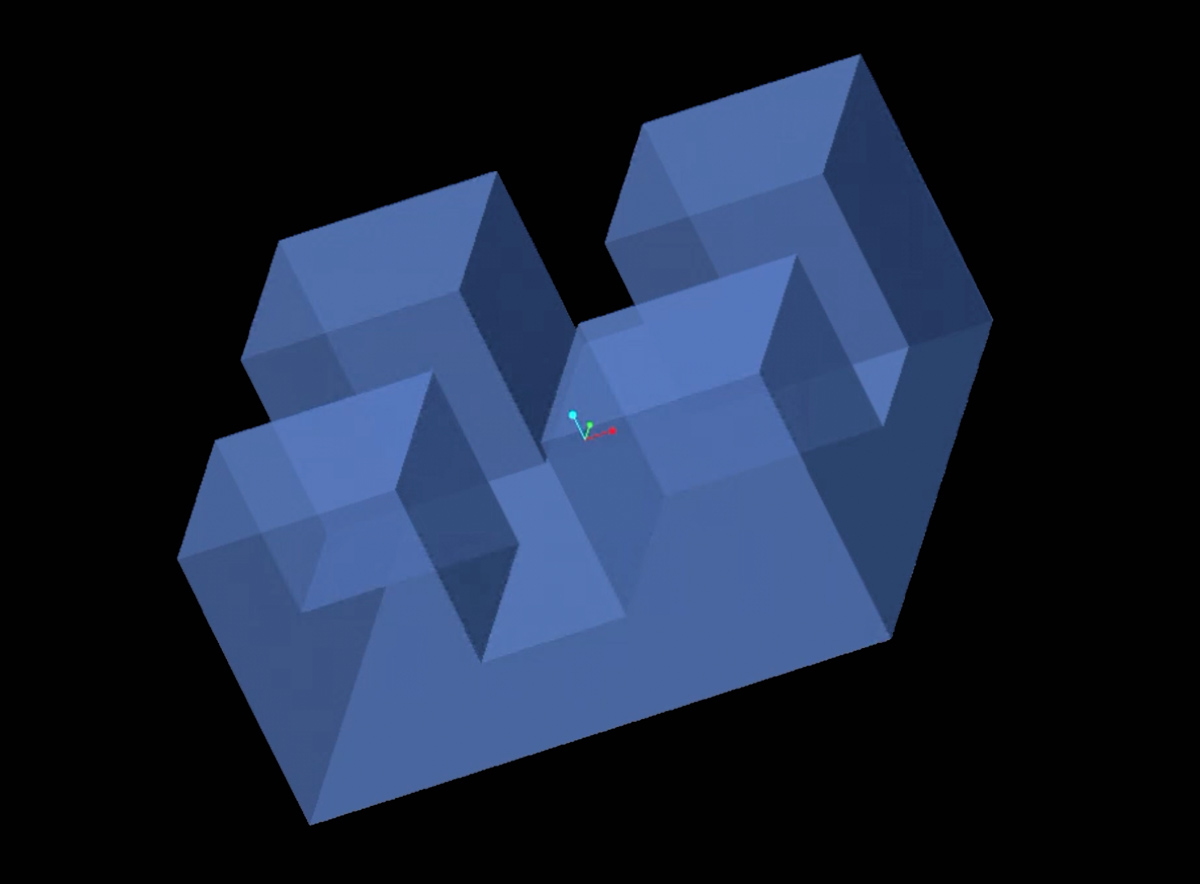
Étape 2 – Façonnage du bloc. “Ensuite par différents usinages on va commencer par lui faire des rainures. Ensuite un trou, puis un autre trou, et encore différents usinages et ainsi de suite jusqu’à avoir l’objet complet. Voilà!”
Étape 3 – Résultat.
Techniques d’hier et d’aujourd’hui. Pour l’occasion, André Guignard qui continue son travail de micromécanicien deux jours par semaine a également fabriqué avec ses imprimantes 3D, des petites pièces, des blocs semblables à celui qu’il a modélisé sous nos yeux, afin de les monter au public. S’il utilise les nouveaux outils disponibles aujourd’hui, sa fraiseuse Aciera n’est pas pour autant en retraite. “Elle est irremplaçable!” s’exclame-t-il.
L’heure du départ. “J’ai fabriqué une cinquantaine de ces souris. J’ai retrouvé un papier qui indiquait à qui elles étaient destinées. L’Université de Zurich avait pris une pièce, à Louvain, deux pièces, on est en 1980! L’ETH avec le professeur Wirth avaient acheté vingt-huit pièces, Brown Boveri, l’INRIA en France, Bell Laboratories aux États-Unis, Siemens à Munich, etc. Ces souris faites à la main et dont le capot était moulé en Araldit ont été disséminées un petit peu partout et c’est ce qui a créé, en quelque sorte, le démarrage de cette épopée souris.”
Industrialisation. “Il n’était plus de mon ressort de fabriquer des souris en série, et après un appel d’offres, seule la maison Dépraz, au Lieu à la Vallée de Joux, accepta de produire des souris en série. Très vite dépassée par la demande, et à la suite d’une livraison défectueuse aux USA (pièces rouillées), c’est la maison Logitech qui reprit, à grands frais, la fabrication de la souris hémisphérique. J’ai conservé un souvenir de cette époque, sous la forme de cette carte postale en provenance de San-Francisco, et datée de 1983. Rien n’était assuré, on ne savait pas ce qui allait se passer. Fallait-il se réjouir ou au contraire se lamenter d’avoir fabriqué des souris?”
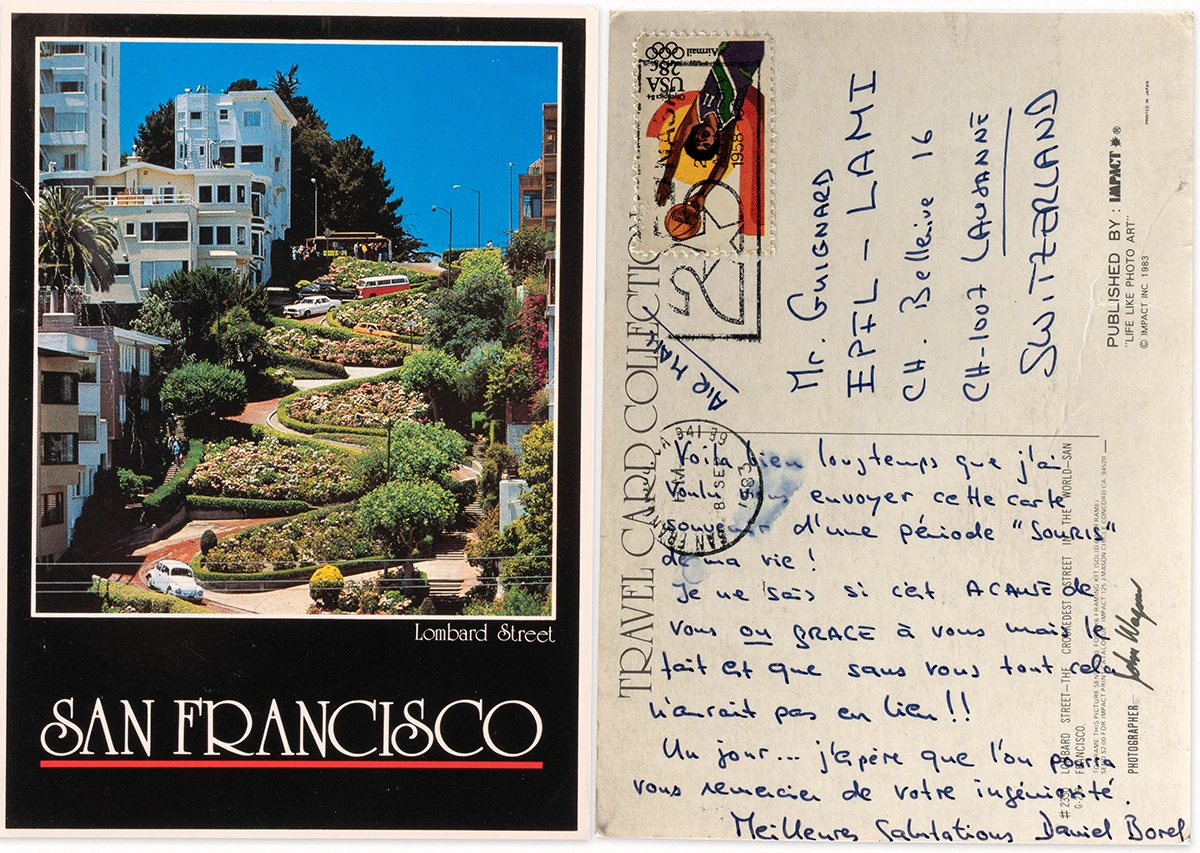
Sous la plume du co-fondateur de Logitech Daniel Borel, on peut lire: “Voilà bien longtemps que j’ai voulu vous envoyer cette carte souvenir d’une période “SOURIS” de ma vie! Je ne sais pas si c’est À CAUSE de vous ou GRÂCE à vous mais le fait est que sans vous tout cela n’aurait pas eu lieu!! Un jour… j’espère que l’on pourra vous remercier de votre ingéniosité.”
La souris a conquis le monde. “Il a donc fallu la foi sans faille de Daniel Borel pour la souris et des efforts incroyables, pour pouvoir fêter, exactement 20 ans plus tard, la 500 millionième souris!”

“Je ne sais pas quel est le nombre de souris actuellement vendu par Logitech de par le monde, aujourd’hui, encore 20 ans plus tard. Tout ce que je sais, c’est que, premièrement, il n’y a sans doute plus une seule souris mécanique en utilisation de nos jours. Et, deuxièmement, que ce périphérique appelé souris est devenu si commun, qu’on a de la peine à imaginer un ordinateur sans souris.”
Conclusion
“En guise de conclusion, je voudrais vous reparler de ce grand savant et visionnaire que fût Douglas Engelbart, qui n’a, et de loin, pas qu’inventé la souris. J’ai trouvé dans ce livre, que je recommande à tous ceux qui veulent approfondir ce que l’on nomme du terme générique intelligence artificielle, ce paragraphe que je vous cite:
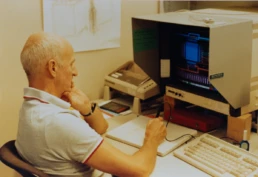
“… Replaçons-nous dans les années 1950 et suivons la direction du regard de celui qui est considéré comme le créateur et le principal prophète de l’intelligence augmentée…” “et pas artificielle” souligne André Guignard avant de poursuivre: “Douglas Engelbart (1925-2013)…
Il est difficile, pour une personne née après 1980, d’imaginer la distance qui existait entre sa vision, largement réalisée aujourd’hui et les ordinateurs de l’époque qui avalaient le soir un paquet de cartes perforées et le recrachaient le lendemain en indiquant le plus souvent une erreur de programmation…
Engelbart a apporté au monde, …, tout ou en partie, des instruments dont on n’imaginerait pas pouvoir se passer aujourd’hui, et dont la disparition soudaine entraînerait l’arrêt immédiat de la plupart des activités humaines: souris, interaction en temps réel, affichage WYSIWYG (“what you see is what you get”), formats mixtes images / graphismes / textes, écran graphique, hypertexte, internet… ».
Les idées directrices qu’Engelbart a formulées très tôt dans sa carrière sont les suivantes: “1) L’agent humain doit pouvoir agir en temps réel avec l’ordinateur…”. André Guignard ajoute: “D’où l’idée de la souris!” et poursuit sa lecture: “2) L’ordinateur doit permettre de visualiser aussi bien des dessins, schémas, graphismes que du texte… 3) L’ordinateur convenablement équipé de ses périphériques doit constituer non une simple trousse à outils, mais un atelier intégré dans lequel les différentes interventions se marient harmonieusement, à l’image des mouvements complexes d’un humain occupé à une tâche intellectuelle ou motrice.” (pages 190-191).
 Parution mai 2023" data-uniqueid="13629-109959" data-guid="https://www.museebolo.ch/wp-content/uploads/2023/10/Daniel_Andler_Intelligence_artificielle_intelligence_humaine_la_double_enigme.webp" data-path="2023/10/Daniel_Andler_Intelligence_artificielle_intelligence_humaine_la_double_enigme.webp" data-width="1171" data-height="1882" data-singlew="300" data-singleh="" data-crop="" data-fixed="width" />
Parution mai 2023" data-uniqueid="13629-109959" data-guid="https://www.museebolo.ch/wp-content/uploads/2023/10/Daniel_Andler_Intelligence_artificielle_intelligence_humaine_la_double_enigme.webp" data-path="2023/10/Daniel_Andler_Intelligence_artificielle_intelligence_humaine_la_double_enigme.webp" data-width="1171" data-height="1882" data-singlew="300" data-singleh="" data-crop="" data-fixed="width" />Questions à André Guignard – La souris, un succès inimaginable
Pour poursuivre ce moment passionnant en compagnie d’André Guignard, le public est invité à poser les questions qu’il aurait.
Est-ce que le fait que l’industrie horlogère avait besoin d’un projet, de nouveaux débouchés, a été le stimulus principal pour qu’il y ait des fonds donnés pour la recherche ou était-ce plutôt qu’à l’EPFL on faisait de la bonne micromécanique?
André Guignard – Ce dont il faut bien se rendre compte, c’est que la souris, à l’époque, en 1976, c’était pas du tout un concept qui était dans l’esprit des gens.
On ne pouvait pas savoir si ça allait être un succès?
A. G. – Personne ne pouvait imaginer le succès qu’elle aurait. Absolument personne. Il a fallu que des gens y croient, dont le professeur Nicoud pour commencer parce que lui y a vraiment cru. Il avait d’ailleurs eu des contacts avec Douglas Engelbart aux États-Unis. Il avait sans doute été impressionné par sa Démonstration d’utilisation de sa souris, même très mal fichue. Il avait donc vu que ce concept était valable. Ensuite, il l’a ramené ici à l’EPFL. On a par la suite fabriqué ces cinquante souris qui ont essaimé. Et puis ce concept, petit à petit, s’est imposé. D’abord, sauf erreur chez Apple si je ne me trompe pas, et ensuite il paraissait évident que chaque ordinateur devait avoir une souris, mais c’était loin d’être le cas à l’époque. Même Xerox qui aurait très bien pu en fabriquer pensait que ce n’était pas intéressant.
D’où vient le nom “souris”?
A. G. – Je pense que c’est Douglas Engelbart qui l’a baptisée ainsi, même si elle ne ressemblait pas vraiment à une souris. Le fait que ça se déplaçait et qu’il y avait une espèce de queue qui était le fil, je pense que c’est lui qui a donné ce nom. Et c’est resté.
Cédric Gaudin – La dénomination souris, vient effectivement de Douglas Engelbart. Dans son laboratoire, il y avait des souris qui se baladaient, qui s’y cachaient. Affectueusement, il a appelé son objet souris parce qu’il avait besoin d’un nom.
Est-ce que dans votre esprit, quand vous avec conçu la première souris, vous avez voulu la concevoir comme un périphérique ou bien vous vouliez que le traitement des données soit fait par l’ordinateur? Autrement formulé, votre idée était de pouvoir calculer le mouvement, etc., en intégrant tout dans une souris ou était-elle de seulement transférer l’information à un ordinateur pour qu’il fasse le calcul?
A. G. – Au début, la souris n’était qu’un appareil de mesure en quelque sorte, qui mesurait les déplacements que l’on faisait avec la main. Et c’est tout. On lui transmettait les signaux que vous avez vus sur l’image des courbes sinusoïdales, et ensuite c’est l’ordinateur qui se débrouillait pour en faire quelque chose. Par la suite, René Sommer a très vite vu qu’il fallait en faire un véritable périphérique tout à fait autonome et universel dans le sens qu’il pouvait être branché à m’importe quel ordinateur avec un protocole connu. Mais au début, c’était très primitif et ça l’est resté assez longtemps.
Remerciements
Le Musée Bolo remercie chaleureusement André Guignard pour sa conférence captivante et animée!
Poursuivre l’aventure
Et pourquoi ne pas poursuivre cette plongée au cœur de l’interface humain-machine (et bien plus encore!) par:
- Le visionnage de la vidéo: André Guignard – La souris, l’interface homme-machine par excellence! – 23/09/2023
- La lecture du portrait illustré d’André Guignard, un virtuose de la micromécanique
- La découverte du rôle de la souris Xerox dans l’épopée du périphérique dans Une souris venue d’Amérique
- Une visite du Musée Bolo (des visites guidées sont possibles)
- Une halte sur la page Mémoires vives où vous attendent d’autres acteurs et récits de cette riche histoire de l’informatique, dont des pages passionnantes ont été écrites en Suisse romande, par André guignard et d’autres pionniers de l’aventure Smaky!
Le Smaky – Une aventure incroyable!
Les souris d’André Guignard, puis Dépraz, ont accompagné les différentes générations de Smaky, micro-ordinateurs made in Vaud.
Cette année, le Musée Bolo a initié le projet 𝗝’❤️ 𝗺𝗼𝗻 𝗦𝗠𝗔𝗞𝗬 afin de mettre en lumière les portraits et les anecdotes des pionniers de cette incroyable, mais encore trop méconnue, aventure, de valoriser les objets exceptionnels de sa vaste collection, et d’expliquer les étapes de la révolution informatique.
Dans ce projet, la souris, pièce essentielle du patrimoine informatique suisse romand, accompagne d’autres innovations audacieuses, développements ingénieux et créations inédites: “Nous avons réuni énormément de matériel Smaky: des documents, des logiciels, des publicités, et les machines, bien sûr. Nous aimerions les mettre en avant. Nous avons également les archives de la pionnière de la presse informatique en Suisse romande, Marielle Stamm, qui nous a donné tous les journaux auxquels elle a participé, et aussi ses pressbooks, que nous souhaitons numériser et préserver. Le résultat de ce projet sera visible sur un site web smaky.ch accessible à tous!” annonçait Cédric Gaudin lors du lancement officiel du projet 𝗝’❤️ 𝗺𝗼𝗻 𝗦𝗠𝗔𝗞𝗬 le 18 mars 2023.
Soutenir 𝗝’❤️ 𝗺𝗼𝗻 𝗦𝗠𝗔𝗞𝗬
Pour réaliser ce projet, le Musée Bolo a besoin de votre soutien! En devenant partenaire, vous nous aidez à mettre en valeur le patrimoine informatique suisse romand et contribuez à la mise à jour de l’histoire de l’informatique. Chaque don compte.
En un clic (de souris!) vous pourrez découvrir le projet complet et détaillé.